Meta-Control Method
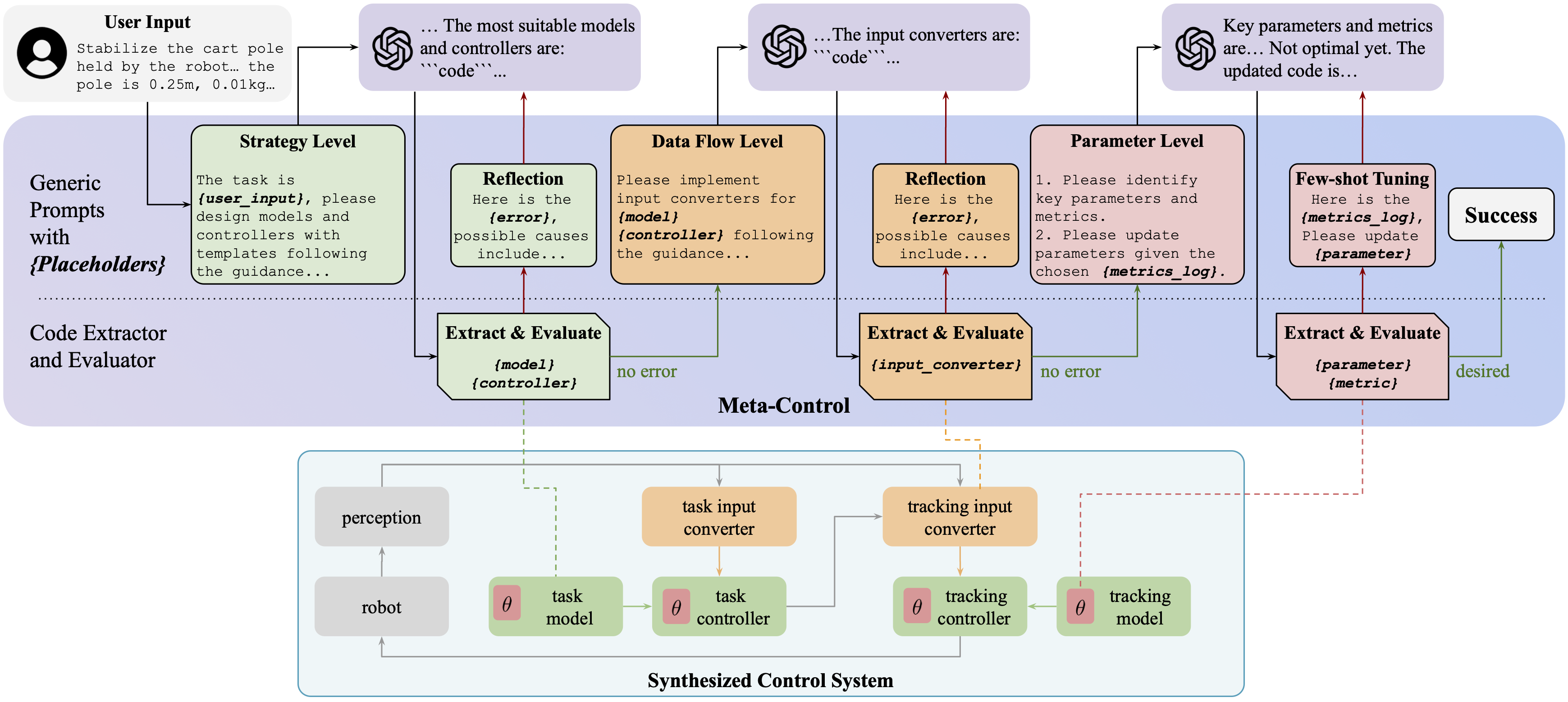
Overview of Meta-Control: The user only needs to provide a skill description. Meta-Control then leverages the control knowledge of LLMs to synthesize skills through a three-level pipeline: strategy level, data flow level, and parameter level. For each level, we have designed a generic prompt with placeholders, which are dynamically replaced with user input or code extracted from the LLM response during runtime, utilizing a code extractor to make the prompt task-specific. The extracted code is also used to construct the control system. At each level, if the LLM-generated code results in an error, a reflection phase is initiated. We have embedded design principles and checklists of common errors within the design and reflection prompts to assist the LLM in producing correct code. The generic prompt design with placeholders allows Meta-Control to generalize to unseen tasks without modification.
Satisfying Diverse Task Requirements
Meta-Control can satisfy diverse task requirements that may happen in open world manipulation tasks, such as
Generalization to Different Embodiments
Meta-Control synthesized control system is fully model-based, enabling generalization to different embodiments. For instance, a control system synthesized on Kinova Gen3 can easily directly generalize to a Franka Panda robot.
Generalization to Different Scenarios
Meta-Control synthesized control system can easily generalize to scenarios of different states thanks to the model-based nature.
initial pole angle = +0.1 rad
door width = 0.3 m
object arrangement 1
initial pole angle = -0.5 rad
door width = 0.6 m
object arrangement 2
Exploiting Dynamical Priors Internalized by LLM
For tasks involving unknown dynamics, Meta-Control can exploit dynamics prior internalized by LLM. For example, in the balance cart pole task. The dynamics of the whole system is unknown. But Meta-Control can give an analytical approximation of the system on the task level. The synthesized control system for this task is shown below. For simplicity, we describe them by text. Specifically, the task level system is modeled as the linearized dynamics in the form of $\dot z = A z + B v$ around the upright position of the pole, where $A$ and $B$ are directly given by the LLM. Exploiting dynamics priors enables Meta-Control to synthesize high-performance controllers rigorously.
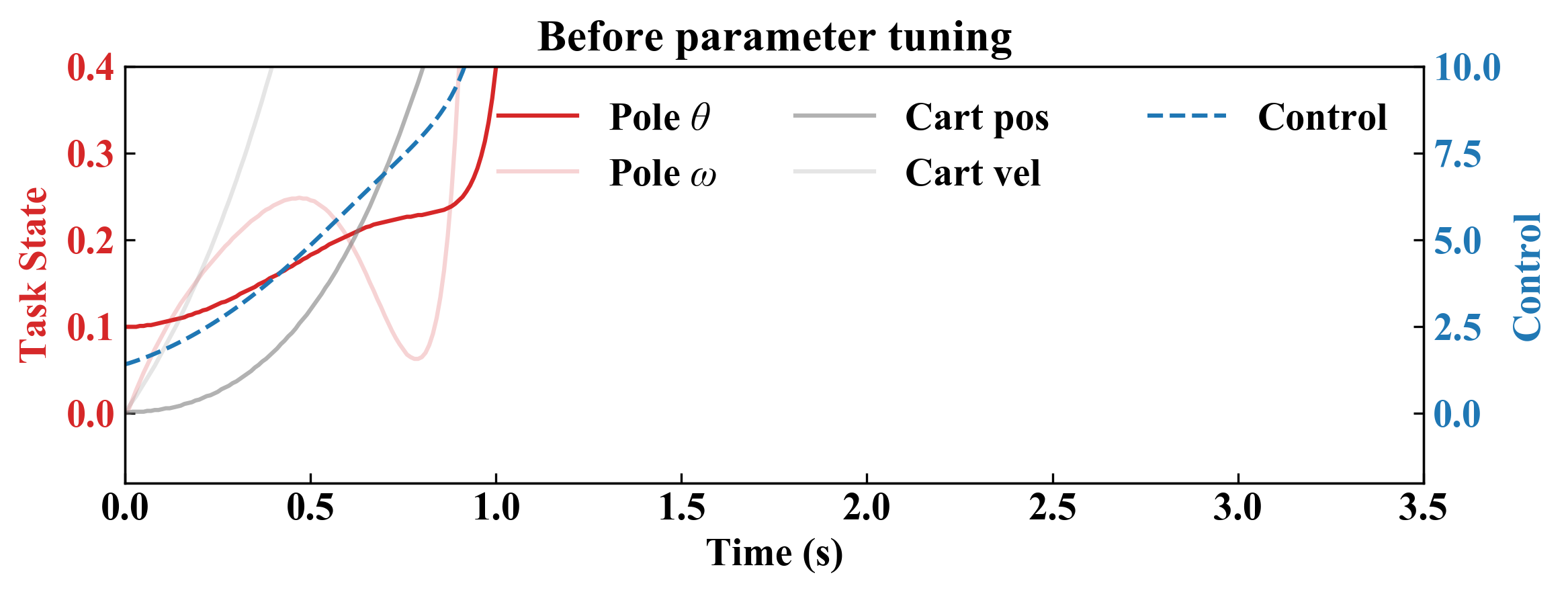
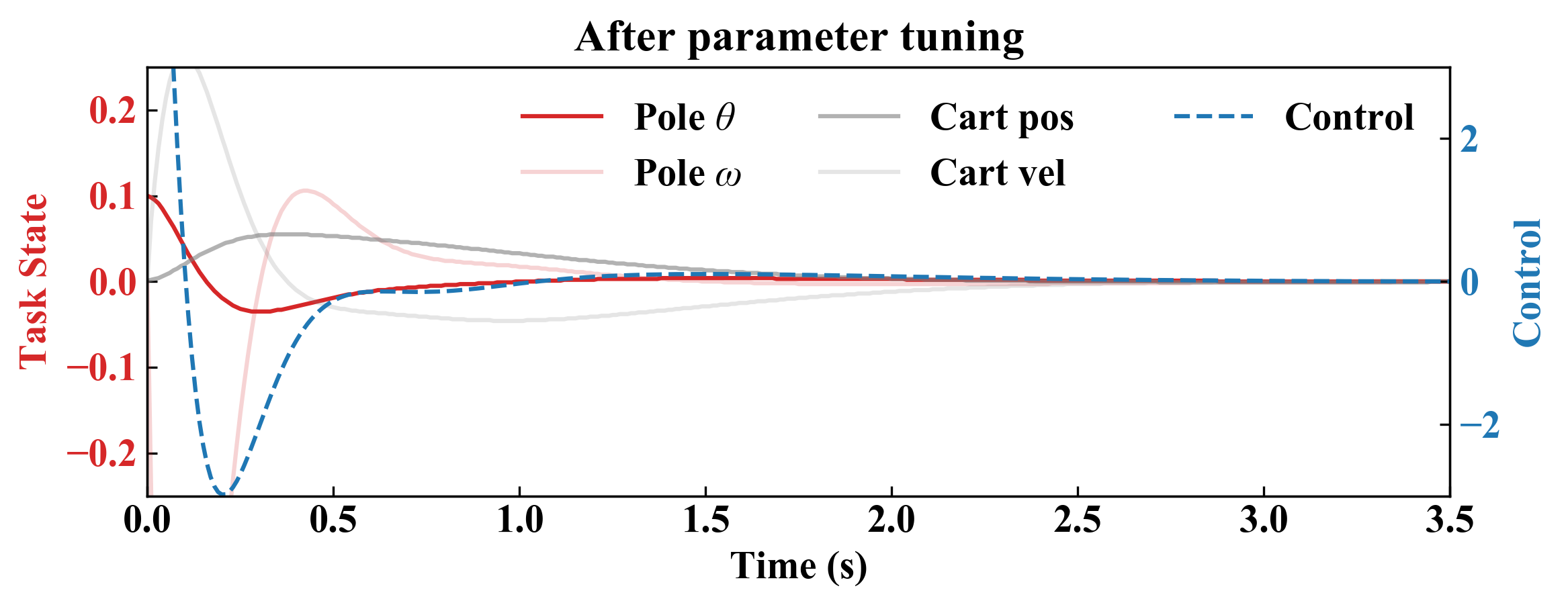
Efficient System Parameters Tuning
Meta-Control can efficiently tune the parameters of the chosen models and controllers to achieve the desired performance. For example, Meta-Control chooses an LQR controller for the balance task, where the Q and R matrices are critical to the performance. Before parameter tuning, the model fails to balance the pole. But with only two rounds of execution, Meta-Control finds the proper parameter that successfully balance the pole.
Rigorous Formal Analysis
Meta-Control synthesized controller is fully model-based. Therefore, we can give rigourous analysis and guarantees for the synthesized control system.
Prompts
Prompts of the Composer:
Design Composer |
Implementation Composer |
Parameter Tuning Composer
Prompts of the control system synthesis:
Design Models and Controllers |
Design Reflection |
Design Summary |
Task Controller Implementation |
Tracking Controller Implementation |
Implementation Reflection |
Parameter Tuning |
Dynamic Model Templates |
Controller Templates |
Input Port Samples
Prompts of the tasks:
Reach the Goal with Collision Avoidance |
Wipe the Whiteboard |
Open the Door |
Balance the Cart Pole |